
ROSFlight
ROSFlight is a lean, open-source autopilot system built by researchers, for researchers. ROSFlight was originally developed by James Jackson, Daniel Koch, and Tim McLain, and is still being developed and improved by members of the MAGICC Lab.
Sep 1, 2024
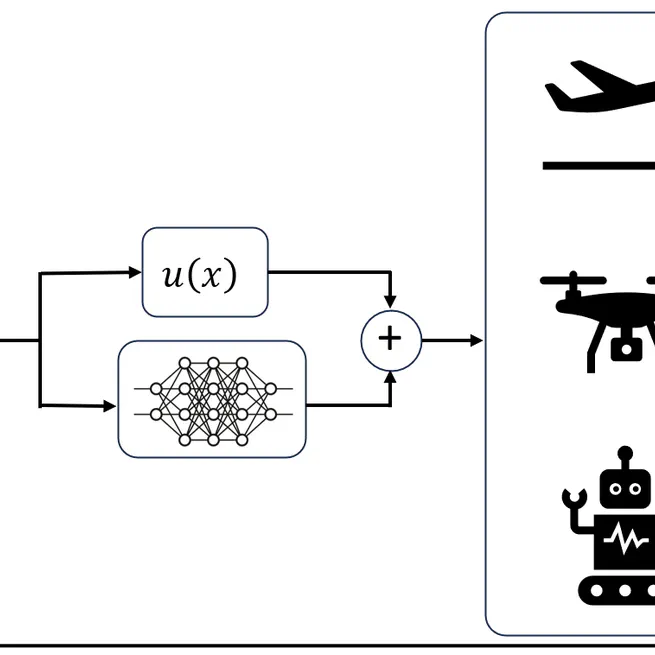
Dynamix - A Lightweight Differentiable Control Simulator
Automatic differentiation has revolutionized how control systems can be developed and simulated. The ability to propagate gradients end-to-end through dynamical simulations allows for simulated control systems to tune parameters and train themselves automatically. In addition, the ability to differentiate through classical algorithms has opened up opportunities to surgically insert neural networks side-by-side with classical algorithms to combine the strengths of both.
May 1, 2024

Safety for Multi-Agent Systems using Control Barrier Function Methods
Safety and collision avoidance are fundamental requirements for operating mobile multi-agent systems. Control Barrier Function (CBF) methods are effective tools for maintaining online safety in dynamic environments with multiple obstacles. CBFs apply an online “filter” to nominal control laws to minimally modify a control law to prevent the system from exiting a set of safe states. CBFs can also be combined with CLFs to compute both safe and stabilizing control laws simultaneously.
Jan 14, 2024
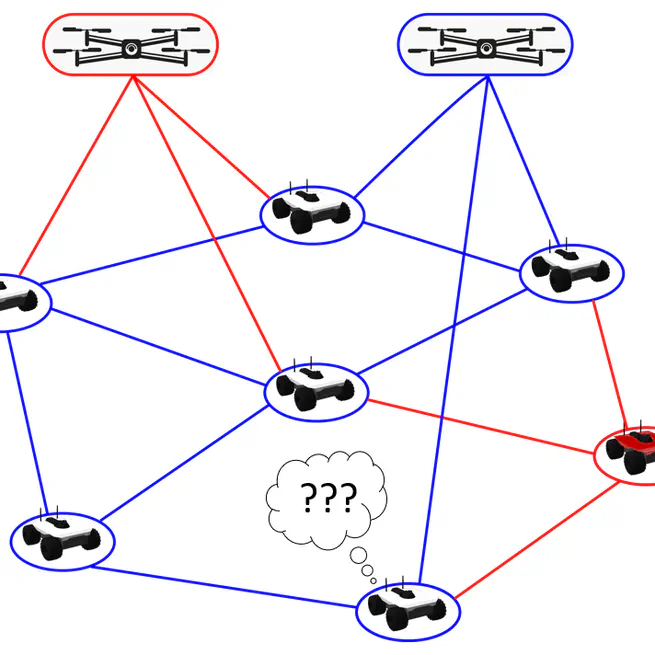
Robust and Resilient Multi-Agent Consensus and Broadcasting
Shared information is necessary for cooperation in multi-agent systems. However, the presence of faulty or adversarial agents can introduce misinformation into the communication network, making it difficult for normally behaving agents to discern whether received information is accurate or not.
Jan 14, 2024
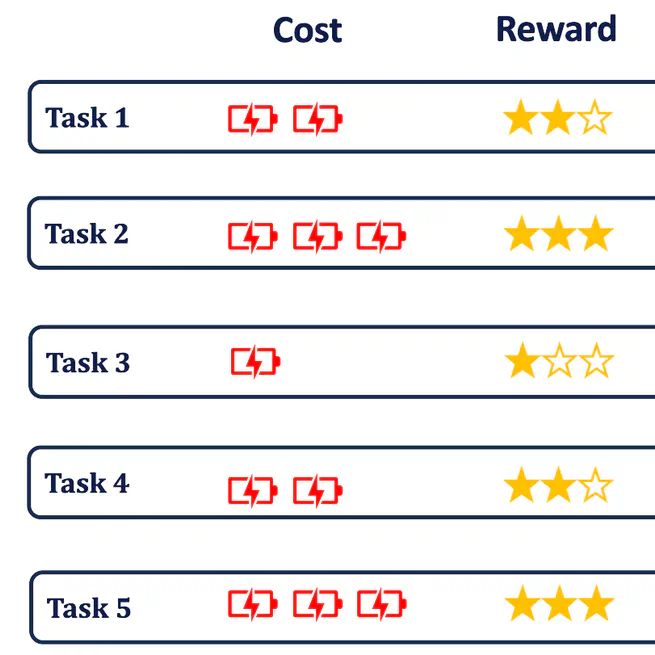
Machine Learning for Combinatorial Optimization
Multi-agent systems require coordination for agents to cooperate effectively towards collaboratively achieving missions. Teams of multiple robots need to perform planning or replanning on the order of seconds to milliseconds in order to quickly react to dynamic environments. However, coordination problems are frequently combinatorial and NP-hard in nature. Using existing algorithms, plans for small teams can take minutes to generate, and this runtime increases to hours or days for larger team sizes.
Sep 1, 2023